| |
ChristopherJam
Registered: Aug 2004
Posts: 1409 |
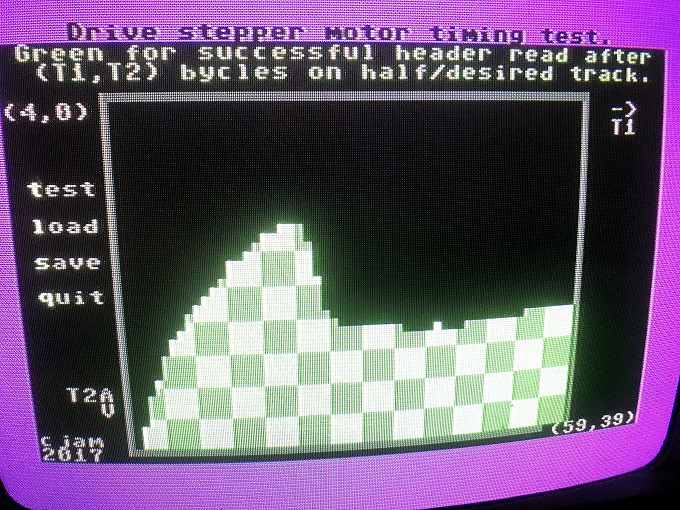
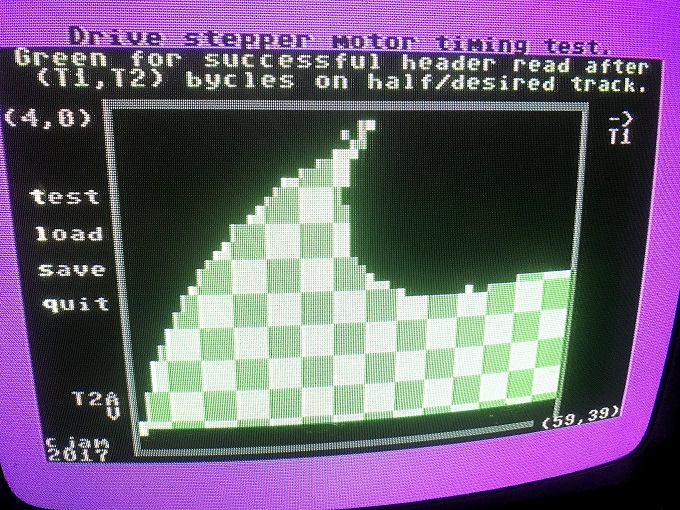
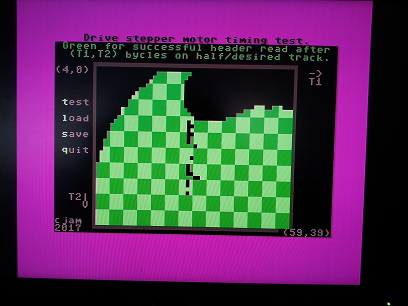
Release id #160665 : Stepper Test 1.0
Copying the production notes below, but I'd really like to see some results from other people's drives for this one. |
|
... 25 posts hidden. Click here to view all posts....
|
| |
Tom-Cat
Registered: Apr 2003
Posts: 20 |
Here is my 1541-II that I currently have attached to my c64c:

Looks ok ? :) |
| |
Oswald
Registered: Apr 2002
Posts: 5095 |
you win the graph niceness compo so far :) |
| |
icon
Registered: Apr 2002
Posts: 90 |
Here is two of my drives (more to come):
1541 (grey and cold)
1570 (white and cold)
 |
| |
chatGPZ
Registered: Dec 2001
Posts: 11391 |
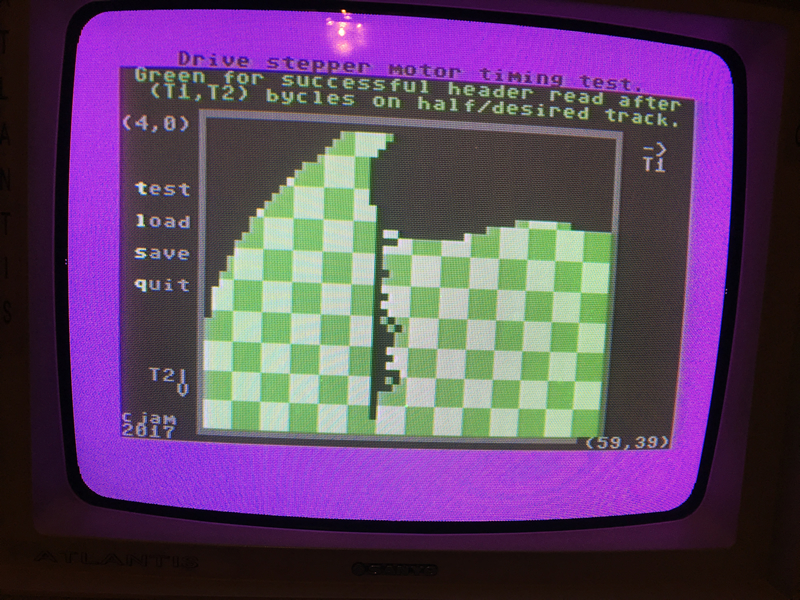
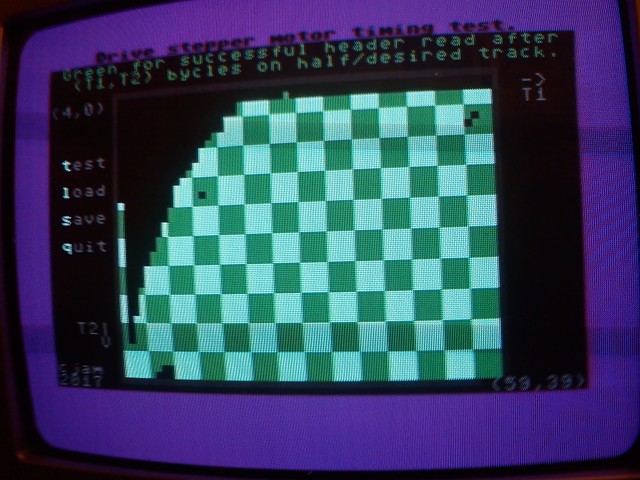
Quote:that drive is *fast*! Did you install a turbo?? Code would have to have a bit of a redesign to zoom any more tightly on that top edge.
random old drive, i only ever cleaned the head and rails and made sure its 300rpm :) (it would be nice of your program had a few maintenance features... like rpm check, motor on/off switch, step to track 1/18/35) |
| |
Impetigo
Registered: Jun 2004
Posts: 33 |
My Oceanic:
Stock JiffyDos kernel, high current power supply.
Doesn't work properly with the original power supply.
 |
| |
Dr.Science
Registered: Oct 2011
Posts: 42 |
1541-II (cold)
 |
| |
ChristopherJam
Registered: Aug 2004
Posts: 1409 |
Thanks everyone, those are all really useful.
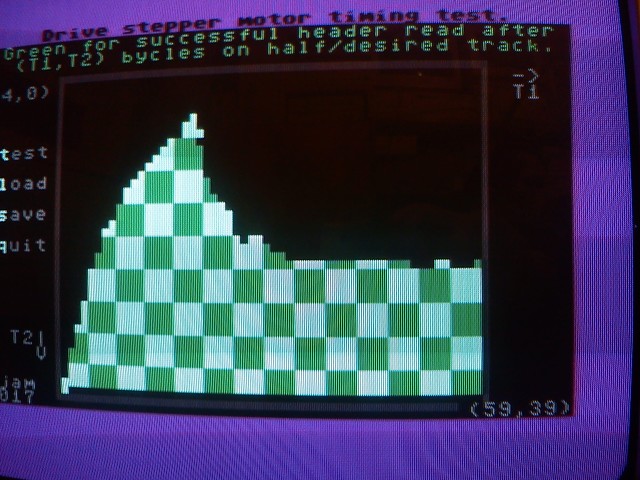
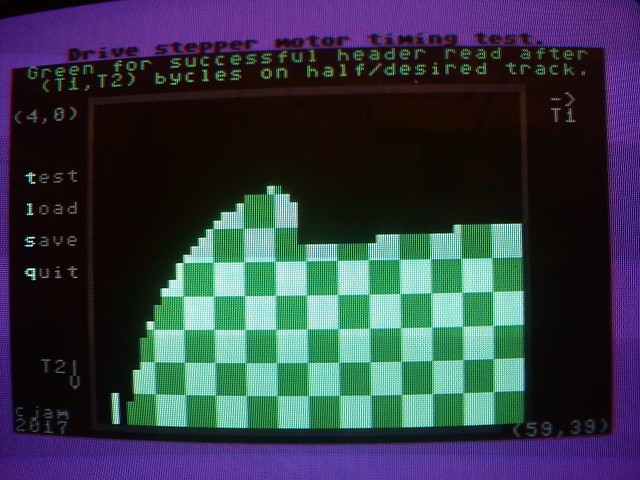
Spending too long on the half track is looking pretty costly on a lot of drives, especially if you catch that spike somewhere around 20-24 bycles. Entertaining given that 25 bycles is the default stepping time before acceleration kicks in..
I suspect what's happening there is the head is oscillating a bit, and that far in it's swung almost back to its starting point. I've tried running a simple physics sim with acceleration proportional to sin((phase-desiredphase)), and friction proportional to velocity. My friction model clearly needs work, as it keeps ringing for far too long, but even with the model as it stands I can already see shapes that loosely approximate some of the readings.
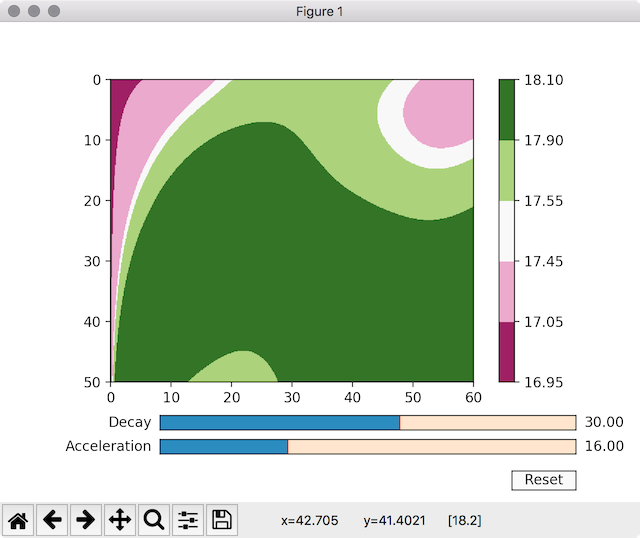
Some sets of parameters indeed result in a spike if the head has almost returned to the starting track at the end of T1, supporting my hypothesis above:
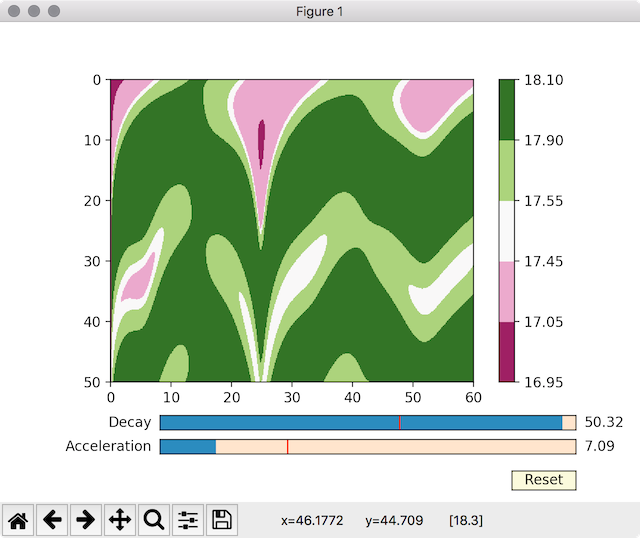
def iter(x0,x1):
a=np.sin((target-x1)*np.pi)
v0=(x1-x0)/dt
dv=v0*dt/Td
v0=v0+a*dt*Ta**-2
v0=v0-dv
return x1+v0*dt
(iter calculates the new head position as a function of the previous two, assuming a constant timestep of dt. Head position in tracks.) |
| |
ChristopherJam
Registered: Aug 2004
Posts: 1409 |
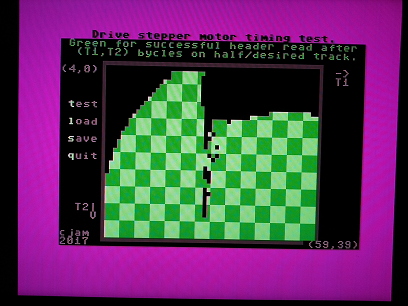
and some more measurements, these from j0x (thanks again!)
Two from an old 1541 push-down mech drive:
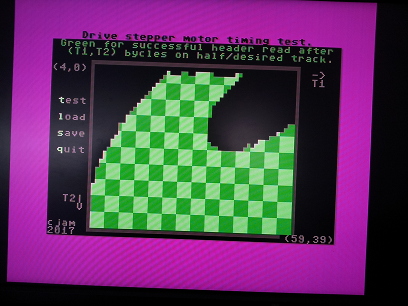
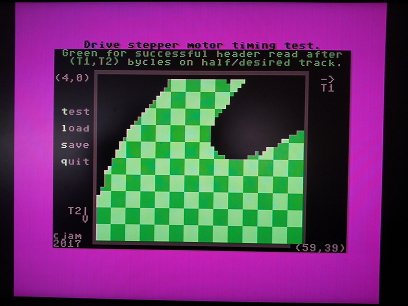
and two from an (almost as) old 1541-II:
 |
| |
soci
Registered: Sep 2003
Posts: 481 |
A bit late, but anyway.
1541-II with refurbished mechanic:
1571:
Another 1571:

Old 1541:
1571CR:

Unfortunately I couldn't do my oceanic this time as it's not here. That'll be interesting as it has an unusual stepper motor and mechanic. |
| |
ChristopherJam
Registered: Aug 2004
Posts: 1409 |
Thanks Soci.
Those 1571s are particularly slow; well worth knowing about. |
| Previous - 1 | 2 | 3 | 4 - Next |
